Comparative study using robotic replication of spinal manipulative therapy (SMT) vertebral kinematics together with serial dissection.
The aim of this study was to quantify loads created in cadaveric spinal tissues arising from three different forms of SMT application.
There exist many distinct methods by which to apply SMT. It is not known presently whether different forms of SMT application have different effects on spinal tissues. Should the method of SMT application modulate spinal tissue loading, quantifying this relation may help explain the varied outcomes of SMT in terms of effect and safety.
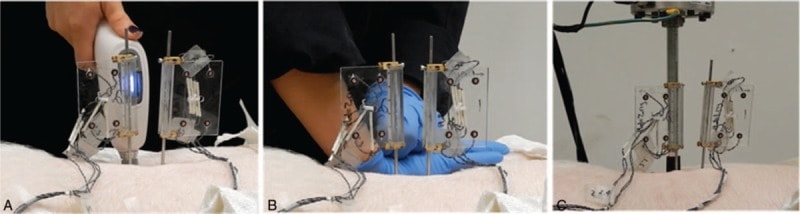
SMT was applied to the third lumbar vertebra in 12 porcine cadavers using three SMT techniques: a clinical device that applies forces through a hand-held instrument (INST), a manual technique of applying SMT clinically (MAN) and a research device that applies parameters of manual SMT through a servo-controlled linear actuator motor (SERVO). The resulting kinematics from each SMT application were tracked optically via indwelling bone pins. The L3/L4 segment was then removed, mounted in a parallel robot and the resulting kinematics from SMT replayed for each SMT application technique. Serial dissection of spinal structures was conducted to quantify loading characteristics of discrete spinal tissues.
In terms of load magnitude, SMT application with MAN and SERVO created greater forces than INST in all conditions (P < 0.05). Additionally, MAN and SERVO created comparable posterior forces in the intact specimen, but MAN created greater posterior forces on IVD structures compared to SERVO (P < 0.05).
Specific methods of SMT application create unique vertebral loading characteristics, which may help explain the varied outcomes of SMT in terms of effect and safety.
Spine (Phila Pa 1976). 2017 May 1;42(9):635-643. PMID: 28146021
Author information: Funabashi M, Nougarou F, Descarreaux M, Prasad N, Kawchuk GN. University of Alberta, Edmonton, AB, Canada.